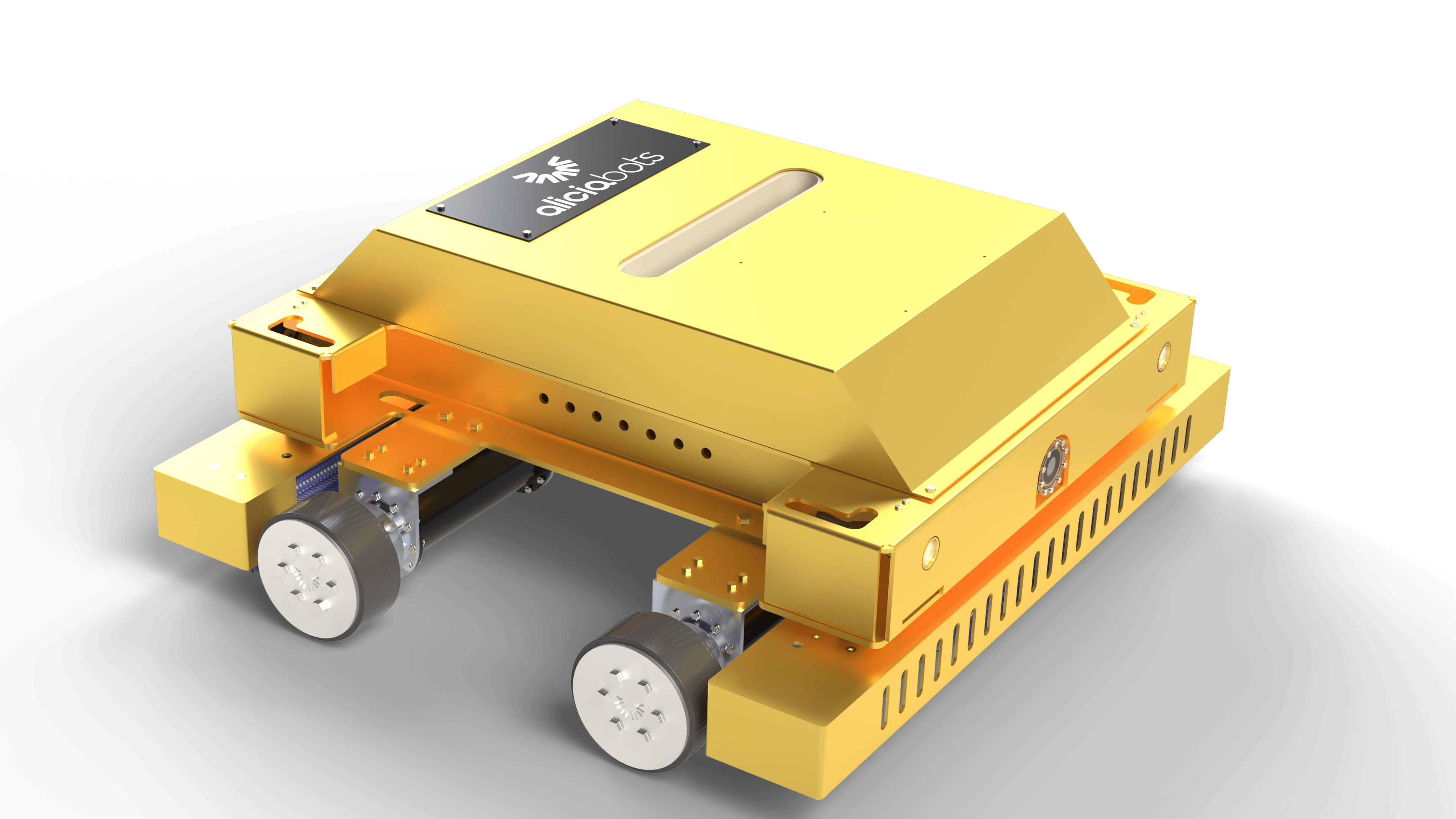
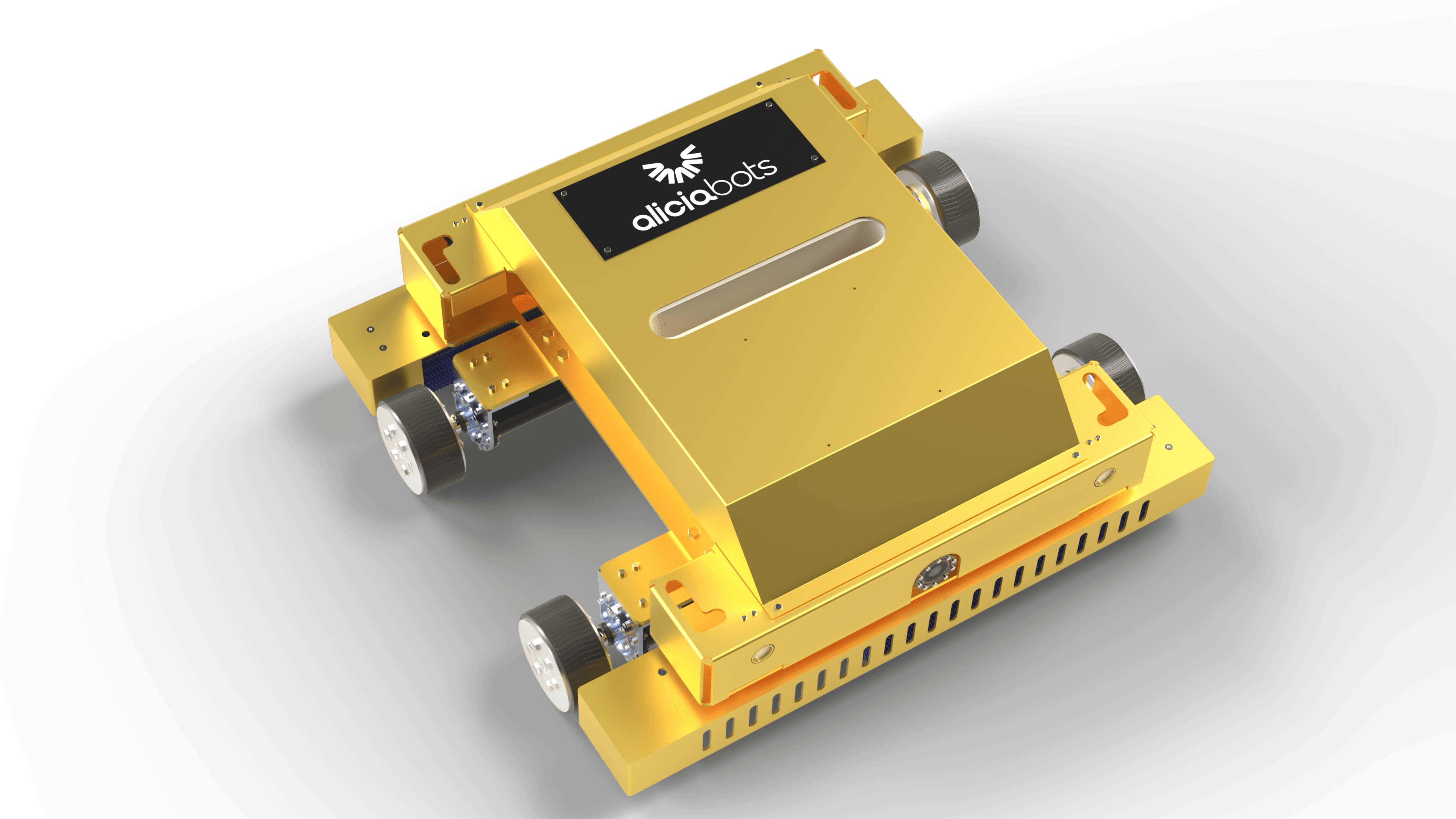
Roverclean 4.0
Semi-autonomous hull grooming robot for proactive micro-fouling control with evidence-grade operations.

Technical details
Dimensions
≈850 × 780 × 400 mm
Main unit; without tether pack
Weight
≈32–35 kg
By module configuration
Power
100–240 V AC, <1 kW typ.
From ship power supply
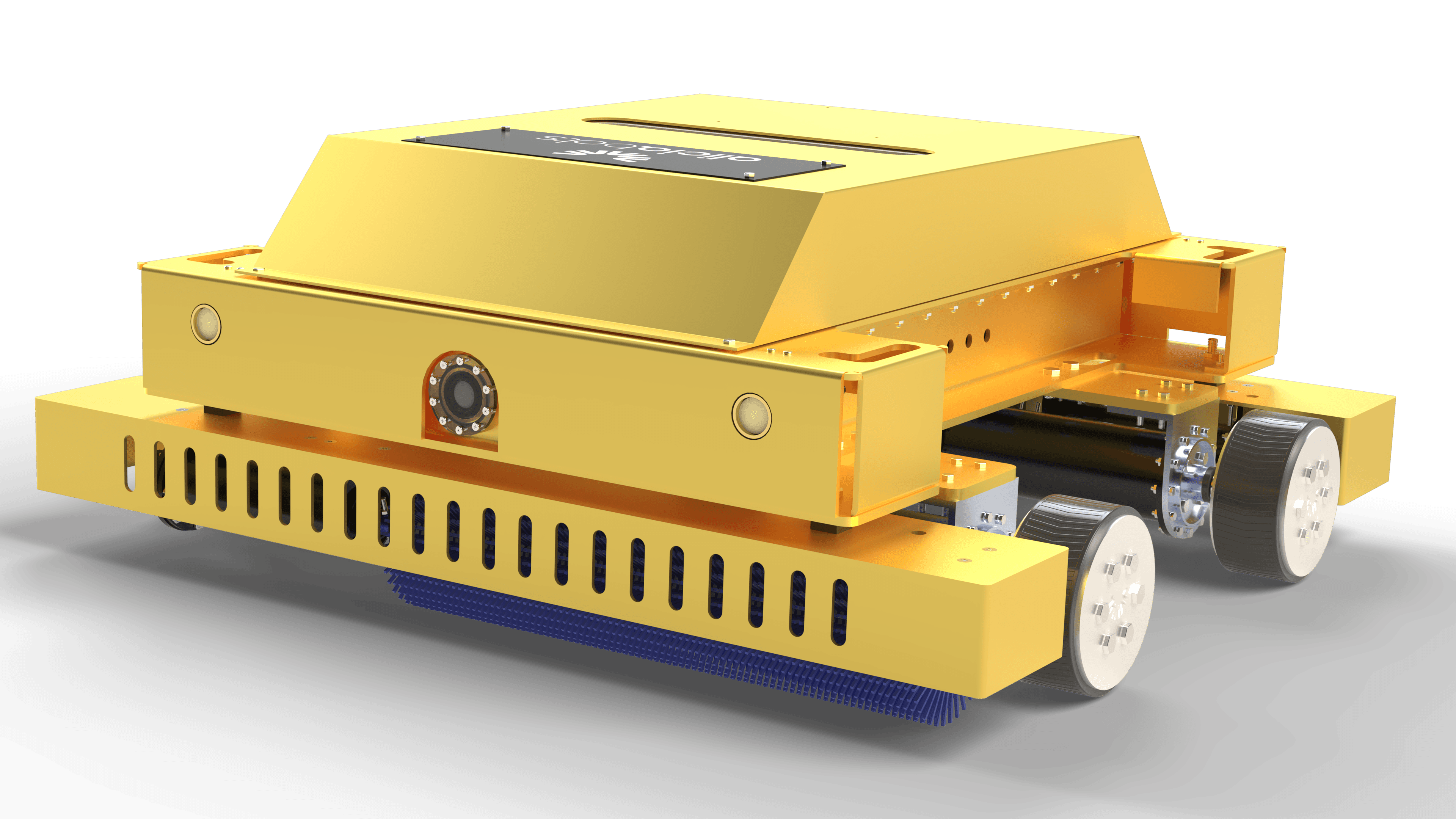
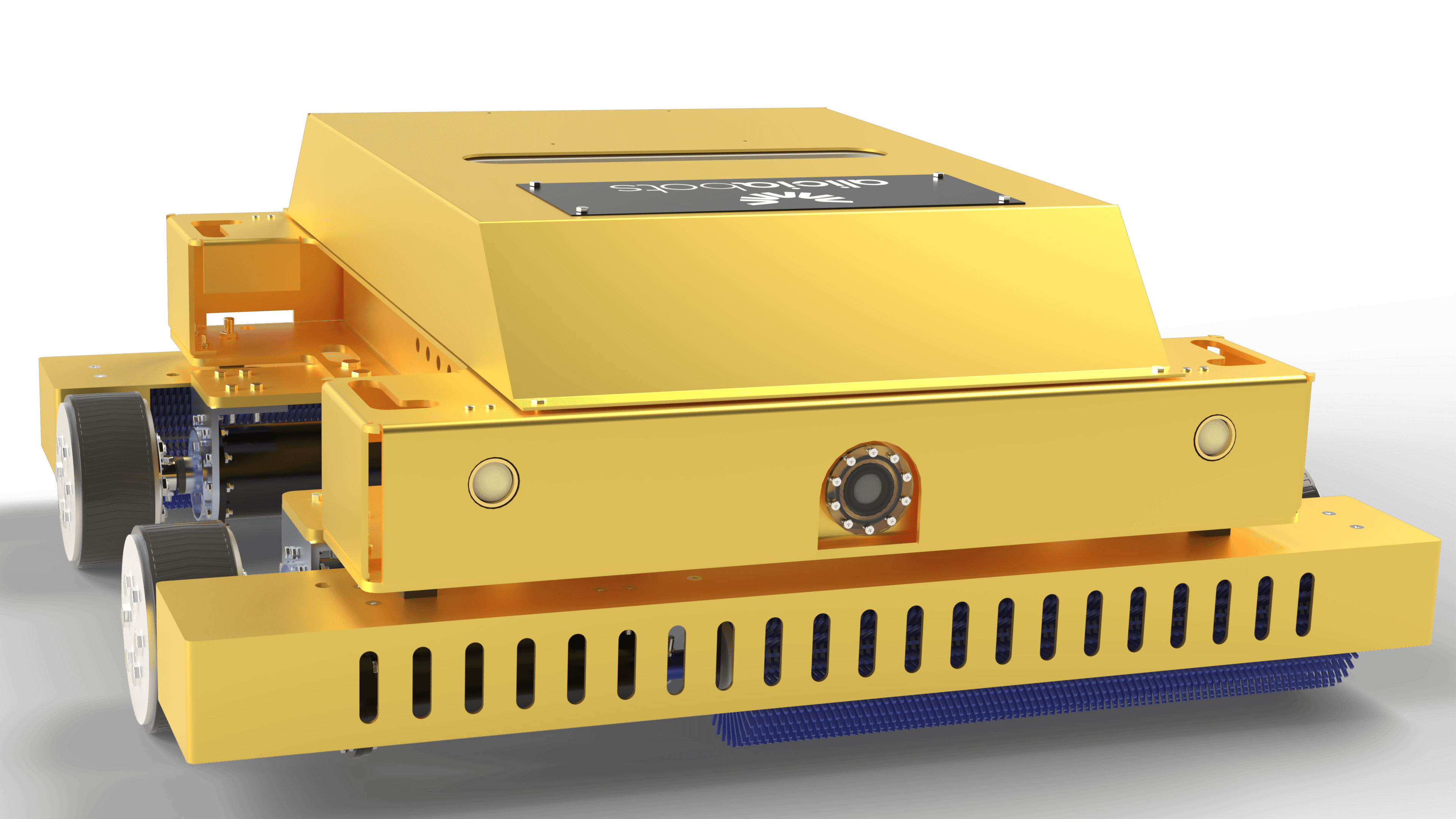
Brush width
≈760 mm
Interchangeable modules
Traverse speed
0.2–0.8 m/s
Operator set
Operating depth
Up to ≈25 m
Flat bottom feasibility
Tether length
Up to ≈350 m
Managed tether
Cameras / Lighting
HD + auxiliary
Evidence capture
Evidence pack
Geo-tagged media + logs
Audit-ready
Gallery
Designed for provable cleanliness
Proactive grooming
Maintains micro-fouling-only state before drag escalates.
Evidence by default
Geo-tagged photos & video with operator sign-off.
Operator-safe SOPs
Defined cordons, comms, compact deck footprint.
Modular brushes
Optimised for micro-fouling, not heavy removal.
Coverage
Vertical sides and flat bottoms (subject to ops feasibility).